Intelligent ground vehicle competition (IGVC)
Description
IGVC is a multidisciplinary competition that takes place in Oakland university, where the main project the development of an Intelligent Vehicle designed and built by undergraduate and graduate students. The project itself involves the implementation of autonomous navigation, obstacle avoidance, path planning, plus the development of the mechanical and electrical aspect of the robot.
My contribution
Team Leader
Lead a team of 6 students from different careers (computer science, computer engineering, and mechatronics) and organize the research stages and development stages to maximize the capabilities of the team and the time. Plus putting attention on the resources that we acquire and ways to promote the project to obtain more sponsors and resources.
CAD design and analysis
Creating the Design of the robot using Inventor Autodesk while making sure that the parameters and materials go in accordance with the manual and limitation of our resources. This also involves doing structural analysis on the robot to make sure that the robot can take the load and find its weak points.
The design only used 1"x1" extruded aluminum to homogenize the raw material and minimize cost, while the pieces only 4 types of angles (90°, 60°, 30°, 45°) to simplify the manufacturing process with the tools and machines that are on hand.

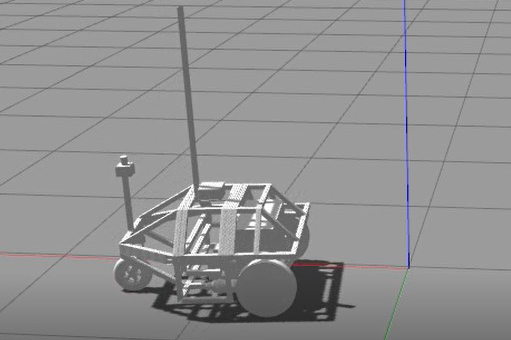
Simulation and ROS implementation
To simulate the robot using Gazebo, a URDF file must be created, where the first part is to define the overall dimensions of the robot to define the collision geometry which will be represented using simple shapes to lower computational load, using a rectangle and cylinders for the 3 wheels. For the weight distribution the CAD model was used to determine the center of gravity and replicate it in Gazebo. For movement, a differential drive library for gazebo was used to simulate the motor specifications that will move the wheels, accordingly, defining parameters like torque, RPM, and acceleration.